导语:
做橡胶仿真的工程师,多少都遇到过作业提交了,等半天,结果报错不收敛。排查起来毫无头绪,改改网格、调调增量步,碰运气。
本文基于项目实战经验,总结5个最常见的不收敛原因。每个原因都配有现象、排查方法。具体的解决方案集中在文末,你可以先对照现象定位问题,再翻到末尾查看对应的解决办法。
01

排查指南:
先从这五个地方下手
原因一:接触定义不当(最常见)
现象:分析刚开始几步就发散,或者计算到某个时刻突然不收敛,常伴随 Too many attempts 错误。
排查方法:检查接触对的主从面方向是否正确(主面优先选刚度大、网格较粗的面,从面选刚度小、网格较细的面,避免主从面颠倒导致节点穿透);检查过盈量是否过大,导致初始穿透;检查接触属性中是否定义了切向行为(摩擦系数)和法向行为(硬接触或软接触),缺失任一行为会导致接触计算异常;
✔ 自检清单:主从面是否选反?初始过盈是否过大?接触属性是否齐全?
原因二:网格畸变严重
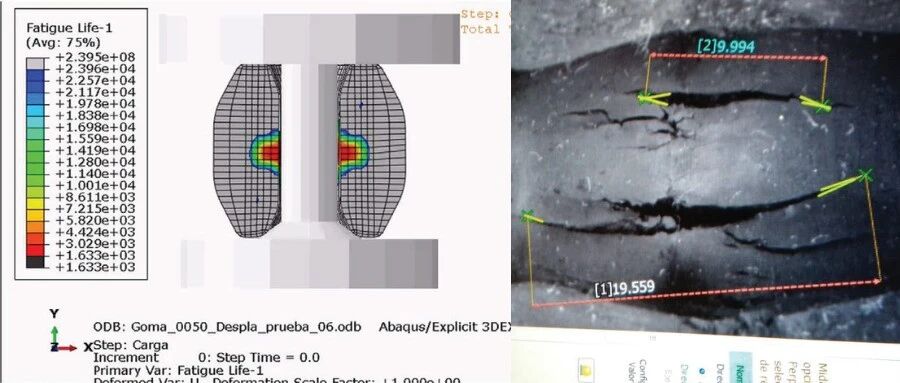
现象:计算到一定变形量时,单元过度扭曲,导致雅可比行列式为负,计算终止。
排查方法:查看最后一帧的变形图,看哪些单元被拉得极长或压得极扁。检查网格质量(长宽比、扭曲度)。
✔ 自检清单:变形最大区域的单元是否被拉长或压扁?长宽比是否超标?
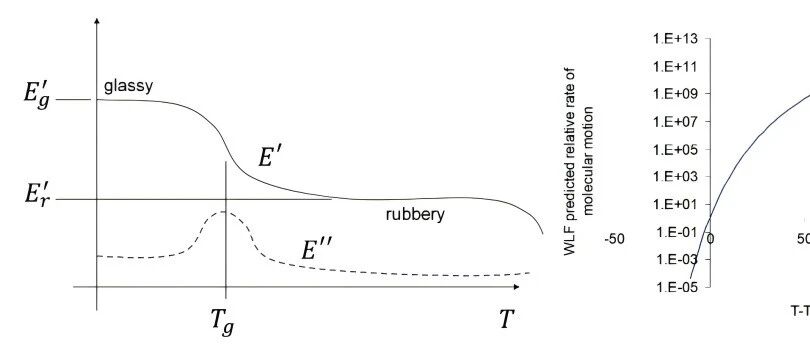
原因三:材料参数不合理
现象:模型在很小载荷下就出现异常大变形,或刚度极低,导致收敛困难。
排查方法:单独检查材料参数:单轴拉伸曲线是否单调递增?在大应变下是否有软化导致斜率为负?泊松比是否接近0.5导致数值奇异?
✔ 自检清单:应力-应变曲线是否单调?泊松比是否接近0.5?单位系统是否一致?
原因四:载荷步/增量步设置不当
现象:分析刚开始或中间某个增量步反复尝试(cutback),最终无法收敛。
排查方法:检查增量步初始值是否过大(建议初始设为0.01甚至更小)。检查是否启用了 automatic stabilization 且参数过大导致结果不准确。
✔ 自检清单:初始增量步是否≤0.01?最大增量步是否过大? stabilization 是否开启过大?
原因五:边界条件与刚体位移
现象:分析刚开始就发散,或出现 Numerical singularity 警告,提示某个节点自由度无约束。
排查方法:检查模型是否存在未约束的刚体位移(如部件未完全固定,或接触建立前部件悬空、可自由移动)。在 Message 文件中搜索 zero pivot 或 Numerical singularity 定位失控自由度。
✔ 自检清单:所有部件是否都有约束或接触?接触建立前是否有部件悬空?
总结与排查流程
遇到不收敛,先看message文件,定位错误类型,然后按上述原因逐一排查:
多数情况下,问题出在接触或网格上。如果以上都无效,建议简化模型(如用二维代替三维)定位问题。
02

各原因解决方案
1.接触定义不当的解决方法
解决方法:
初始过盈需避免强行禁止调整,建议使用 Adjust=0.01~0.1mm(小幅度自动对齐主从面),而非 Adjust=0;对复杂接触,先建立只含接触的简单模型测试,跑通后再逐步开启摩擦;尝试使用 Contact stabilization 增加阻尼帮助收敛(阻尼量级需尽可能小,避免影响结果真实性);若存在过大过盈,可增加小位移预步消除过盈,同时减小初始时间步长,提升收敛稳定性。
tips:
橡胶大变形时,从面网格应比主面细。建议主面为解析刚体。
2.网格畸变严重的解决方法
解决方法:
使用杂交单元(如C3D8H、C3D10H)适应近似不可压缩性。对应变较大的区域,重新划分更细的网格,或使用自适应网格(ALE)。考虑使用减缩积分单元(如C3D8R)避免剪切自锁,但要注意沙漏控制。
tips:
大变形压缩分析中,应优先提升局部网格质量并合理控制增量步,过度依赖 ALE 可能导致结果漂移或接触异常。
3.材料参数不合理的解决方法
解决方法:
确保应变能密度函数拟合的曲线在试验范围外不会异常下降。对几乎不可压缩材料,使用杂交单元,并在材料中指定较小的可压缩性(如设置D1=1e-5量级)。检查单位系统是否一致(如应力用MPa,长度用mm)。
tips:
可通过建立试验用试样进行拉伸测试,直观验证材料应力应变关系是否符合预期,避免参数或单位错误带入整体模型。
4.载荷步/增量步设置不当的解决方法
解决方法:
将初始增量步设为0.001~0.01,最大增量步设为0.1。对于高度非线性问题,使用 Riks 弧长法代替通用静力分析。开启 unsymmetric solver 解决由于摩擦或接触引起的非对称刚度。
tips:
对于接触、滑移、屈曲类强非线性问题,适当缩小最大增量步,避免因步长过大跳过关键变形阶段导致不收敛。
5.边界条件与刚体位移的解决方法
解决方法:
在接触建立前,使用临时边界条件(如弱弹簧)稳定模型。确保所有部件都通过约束或接触完全定位。使用 stabilization 增加人工阻尼,但需注意结果影响。
tips:
在第一步分析中,先施加一个微小位移使接触建立,再施加真实载荷。
后续支持:
以上5个原因覆盖了大部分橡胶仿真不收敛的场景。但每个模型都有其特殊性,排查起来依然费时。
如果您有具体的模型不收敛问题,或者想和我们交流橡胶仿真的技术细节,可以扫描下方二维码,直接与我们的工程师取得联系。欢迎技术交流。
END